
Introduction

Figure 1: Hexagon Satellite (Wikipedia).
I just listened to a very interesting interview of Philip Pressel, a retired Perkin-Elmer mechanical engineer and satellite surveillance camera designer. The interview was conducted by Vince Houghton of the International Spy Museum. Philip discussed how the recently declassified KH-9 Hexagon (Figure 1) camera system was designed and I found his information very interesting. The general public may not be quite as interested because Philip does dive into low-level details, but I love low-level detail as my life is a celebration of detail.
My goal here is to see if I can derive some of the camera operating characteristics based on the information that Phil mentioned during the interview. The analysis shown here will be approximate. My main interest in cameras is for astronomy, and I find these cameras interesting because NASA has been looking at using non-film versions of them for other purposes, like imaging Mars.
I do want to mention the excellent job that Vince Houghton does for the International Spy Museum. If you want to see him at his best, check out this CSPAN video of his lecture on the espionage Russia conducted on the Manhattan project during World War 2. I am a big CSPAN/BookTV fan and I consider Vince's "Atomic Spies" video one of the best I have seen.
Background
Interview
Figure 2 shows the Youtube interview that I watched.
He also gave the following audio interview, which also is interesting. Unfortunately, I could not find the presentation material that he refers to in the audio.
Spy Satellite Basics
Here is some general information on the KH-9 Hexagon satellite. For more of the detail, see the links, audio, and video I discussed above.
- KH-9 Hexagon was designed in the late 60s and was the last of the film satellites.
Film created all sorts of issues because it had to be returned to Earth. The KH-9 Hexagon contained four reentry vehicles so that it could return its images throughout its long mission time – the final mission lasted 275 days. Film does have an amazing information density and it proved to be a good medium for storing large amounts of data. This data is now being used by archeologists for finding ancient ruins, but that is another story.
- The satellite has two cameras that are synchronized to take stereoscopic images.
Stereo images allow photo-interpreters to derive all sorts of properties from the objects that were photographed, like their heights, distances between objects, and slopes.
- The satellite is in an elliptical polar orbit with an perigee of ~155 km and an apogee of ~240 km.
The polar orbit allows the KH-9 to photograph the entire Earth's surface, while using a low earth orbit means that they are close enough to the ground to achieve good resolution.
- The camera uses strip photography
These cameras would rotate and project their image through a slot onto moving film. I will not go into the technology in the post, but there Wikipedia article that has a good discussion on the topic. Figure 3 shows a crude illustration. Notice how the camera is constantly rotating, but only exposes film when the Earth is in view.

Figure 3: Illustration of KH-9 Scanning (Ambivalent Engineer).
- To obtain clear images, the camera must compensate for the motion of the satellite over the Earth.
Since the satellite was in a polar orbit, the camera would "nod" to cancel out the motion in the direction of travel (called the in-track direction). This meant that the camera would then scan side-to-side (called across-track direction) to generate a panoramic image.
- The KH-9 Hexagon used film that had to be returned to Earth.
The satellite had four reentry vehicles for returning film. The film was picked up while hanging from a parachute using a cargo aircraft with a special device (Philip called it a 'trapeze') to grab the film reentry vehicle. Figure 4 illustrates the film recovery process.
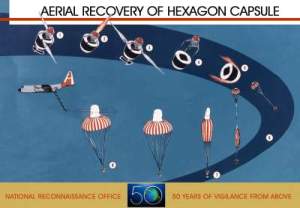
Figure 4: Film Canister Reentry Vehicle Recovery.


Camera Types
Figure 5 shows the two types of cameras carried by the Hexagon satellite.

Figure 5: Hexagon Carried Two Types of Cameras.
My discussion here will focus on the pan cameras, which was used for obtaining detailed images of the ground.
Analysis
Reference Table
The Ambivalent Engineer blog gives the following table of KH-9 Hexagon parameters and I thought it might be useful to see how much of this table I could derive with a bare minimum of inputs. As part of my job, I spend much of my day deriving requirements and I always find it interesting how little information you need to determine many of the characteristics of complex systems.
| Parameter | Value |
| Focal length | 1524 mm (60 inches) |
| Aperture | 508 mm (f/3.0) |
| Cross-track Field of View | 120 degrees |
| Film width | 168 mm (6.6 inches) |
| Film length | 70,000 m (230,000 feet) |
| Format | 155 (width) x 3190 mm (length) |
| Film resolution | 1000:1, contrast: 3.7 micron;1.6:1 contrast: 7.4 microns |
| Depth of focus | +/- 11 microns |
| Format resolution | 42k x 862k = 36 Giga-pixels |
| Frames | 21000 |
| Nominal Altitude | 152 km (82 nautical miles) |
| Center ground resolution | 37 cm |
| Swath | 555 km |
| In-track field of view, center | 15 km |
| Nominal overlap | 10% (each camera) |
| Area collected | 2x 80m km2 |
| Nominal ground velocity | 7,800 m/s |
| Cycle time | 1.73 sec |
| Film velocity at slit | 5.5 m/s |
| Maximum slit size | 22? mm |
| Max exposure time | 4? ms |
I can only guess how certain system parameters were determined. For example, film speed has to do with the chemistry of the film. Orbital characteristics would probably be determined by the improved resolution you get with lower orbits balanced with the need to avoid air resistance in order to stay in orbit.
Here are the values that I will assume:
- Film size: 155 mm x 3190 mm
The film height (155 mm) can be determined knowing the resolution you want and the in-track distance that will be imaged on it. The film width (3190 mm) is more complicated to determine because the resolution is a function of the scan range. Philip mentioned the system supported a 120° scan range, but I noticed in other documents that they also used 90° and 60° scans. This would increase the resolution at the less swatch width.
- Film speed: ASA 4000
The Ambiguous Engineer blog states that earlier camera systems had used ASA 4000 films and that these films may have been used for the KH-9 Hexagon.
- Film resolution: 3.7 μm
The concept of resolution for film is a complex one, mainly because it is function of contrast. I will use the Ambiguous Engineer's assumption of a 1000:1 contrast range.
- Overlap percentage: 10%
All imaging systems I have worked on included overlap. In sonar systems, I often had 50% overlap so 10% overlap does not seem excessive to me all.
- Number of film frames: 21,000
This number is determined by the amount of land area you want to image and the packaging limitations of the satellite – I would have no idea what these requirements were.
- Orbit characteristics: 155 km x 240 km
The orbit is very important because the closer you can get to your photographic subject, the better the resolution you can obtain. However, if you get too close you will not be able to stay in orbit.
Computations
Figures 6-8 show my calculations. I have verified all the items in Table 1. Items highlighted in yellow are listed in Table 1.

Figure 6: Calculations (Page 1).

Figure 7: Calculations (Page 2).

Figure 8: Computations (Page 3).
Conclusions
I think I have a pretty good understanding of how a small number of system parameters, in particular orbital velocity and in-track swath, drove the hardware characteristics of this system.
Strip cameras are new to me and I think I will research them a bit more.
Thank you for your informative page. Additional details regarding the HEXAGON KH-9 overhead surveillance system are available at http://www.nationalmuseum.af.mil/Visit/MuseumExhibits/FactSheets/Display/tabid/509/Article/195921/hexagon-kh-9-reconnaissance-satellite.aspx
I served as a docent at the National Air and Space Museum in the National Mall Building from 2009-2012. I focused on the CORONA surveillance satellite system. The HEXAGON is based on CORONA's technology. http://airandspace.si.edu/exhibitions/space-race/online/images/coronaview.jpg
My name is Phil Pressel and am that author of Meeting the Challenge, the Hexagon KH-9 reconnaissance satellite. I disagree with some of your analysis. The main factor that contributes to film speed is V/h where V is the velocity of the satellite in orbit and h is its altitude above the earth at whatever place it is in its orbital path. V/h appears in almost every equation governing the control of the satellite, i.e. optical bar rotational speed, film speed, change in skew angle allowing the film at the focal plane to compensate for image motion. Film speed of ASA 4000 i not right. Depending on the film quality Kodak identified film by a product number and over the years of the program Kodak came up with major resolution improvements for both black and white and color film as well as its thinner films (that is the only effect of chemistry). Air resistance had no effect on resolution because we were in total vacuum at perigee and apogee. Also resolution was expressed in lines per millimeter. Further and more thorough explanations are located in my book in chapters 9, 11 and appendix C. Thank you for your interest for many of your correct facts or information. I now have a blog called hexagonkh9.com.
Hi Phil!
It is an honor to hear from you – I really appreciate the review of an expert. I watched your interview and was fascinated by it. I tried to estimate some some numbers based on what I heard, but it looks like I got some things wrong. I will review your web page and will update my post.
Thank you for the wonderful briefing on the exceptional work of you and your team.
Mark